Geometrically, this is happens to be the equation of a plane through $\,(0,0,0)\,$ with $\,\mv\,$ as the normal vector. Determine the solution, bring it to standard parametric form, and then you have the two basis vectors that span the complement.
answer
A basis is:
$$(\,(-2,1,0),(-3,0,1)\,)$$
C
Find in $\,\reel^3\,$ a basis for the orthogonal complement to the subspace spanned by $\,(1,1,0)\,$ and $\,(0,2,1)\,.$
answer
A basis is the crossproduct:
$$(1,-1,2)$$
D
Find in $\,\reel^4\,$ a basis for the orthogonal complement to the subspace spanned by $\,(1,-1,2,5)\,$ and $\,(0,1,0,-2)\,.$
hint
A homogeneous system of linear equations consisting of two equations with four unknowns emerges. Determine the solution, bring it to standard parametric form, and then you have two basis vectors that span the complement.
answer
A basis is
$$\,(\,(-2,0,1,0),(-3,2,0,1)\,)\,.$$
Exercise 2: When There are $\,n\,$ Different Eigenvalues
A
Why is it particularly easy to diagonalize a symmetric $\,n\times n\,$ matrix by orthogonal substitution, if it has $\,n\,$different eigenvalues?
answer
If you take an eigenvector belonging to each of the eigenvalues then the collected set of eigenvectors is already an orthogonal basis for $\,\reel^n\,.$ If you then normalize the vectors (so they all have a length of 1), then you have an orthonormal basis for $\,\reel^n\,.$ The matrix that appears when you put the basis vectors together can diagonalize the given symmetric matrix (by orthogonal substitution).
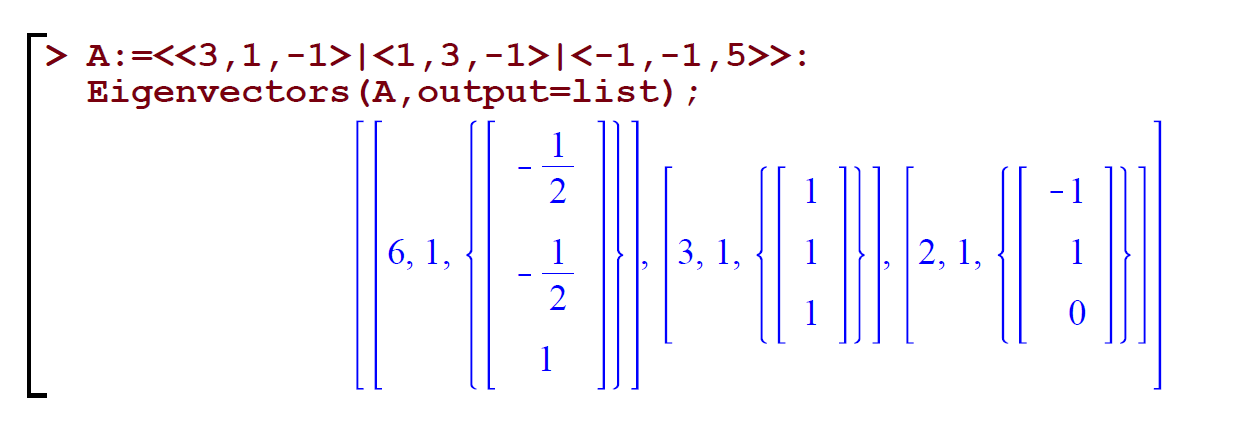
A $\,3\times 3$ matrix $\,\mA\,$ has been treated in Maple, like this:
B
State $\,\mA\,$ in ordinary mathematical notation and explain that it is symmetric.
C
Let $\,f\,$ denote the linear map that has the mapping matrix $\,\mA\,$ with respect to the standard basis in $\,\reel^3\,.$ Determine an orthonormal basis for $\,\reel^3\,$ consisting of eigenvectors of $\,f\,,$ and state the mapping matrix that represents $\,f\,$ with respect to the orthonormal basis found.
hint
You normalize a vector by dividing the vector with its length. Consider e.g. $\,(1,1,1)\,.$ Its length is $\,\sqrt{1^2+1^2+1^2}=\sqrt{3}\,.$ Therefore the normalized vector – the norm of the vector – is $\,(\frac{1}{\sqrt{3}},\frac{1}{\sqrt{3}},\frac{1}{\sqrt{3}})\,.$
Enter the basis vectors from the previous answer as columns in a $\,3\times 3$ matrix, then you have $\,Q\,.$ The corresponding diagonal matrix $\,\mathbf{\Lambda}\,$ is the one that was given in the previous answer.
Exercise 3: Eigenspaces with gm > 1
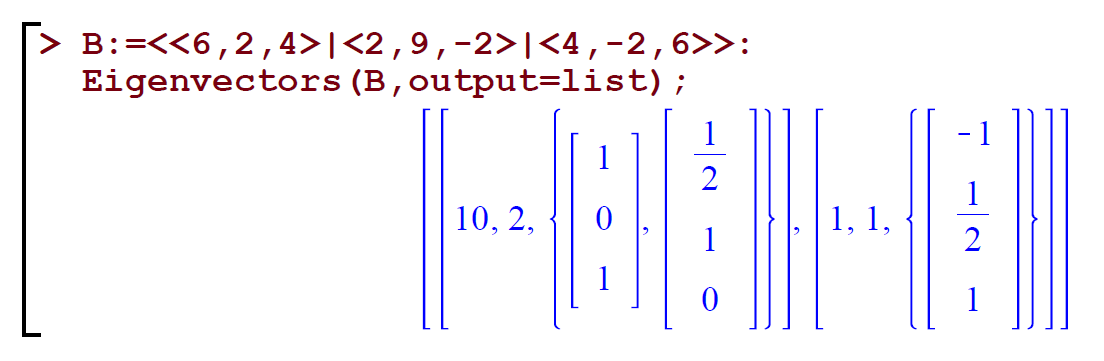
A $\,3\times 3$ matrix $\,\mB\,$ has been treated in Maple like this:
A
State $\,\mB\,$ and explain that it is symmetric.
B
Determine an orthogonal matrix $\,Q\,$ and a diagonal matrix $\,\mathbf{\Lambda}\,$ such that
Maple gives a set of three linearly independent eigenvectors. But the two that belong to $\,E_{10}\,$ are obviously not othogonal (their dot product is not 0). Use the Gram-Schmidt procedure to find an orthonormal basis $\,(\,\mathbf q_1,\mathbf q_2)\,$ for $\,E_{10}\,.$ Then $\,\mathbf q_3=\mathbf q_1\times \mathbf q_2\,$ lies in $\,E_{1}\,,$ the orthogonal complement to $\,E_{10}\,.$ Therefore $\,(\,\mathbf q_1,\mathbf q_2,\mathbf q_3)\,$ is an orthonormal basis for $\,\reel^3\,$ consisting of eigenvectors for $\,\mB\,.$
Exactly eight possible orthonormal bases for $\,\reel^2\,$ consisting of eigenvectors of $\,f\,$ exist. Make a drawing where the basis vectors drawn from the origin are shown.
But the first basis vector does not have to be located in the 1st quadrant.
B
Four of the eight bases have the standard orientation. Show that the orthogonal matrix that belongs to each of the four is special-orthogonal (has a determinant of 1), while the other four are not.
answer
One of the four bases that has the standard orientation is given in the previous answer. The determinant of its corresponding orthogonal matrix is 1. Therefore it is special-orthogonal.
Exercise 5: Special-Orthogonal Matrix as Mapping Matrix
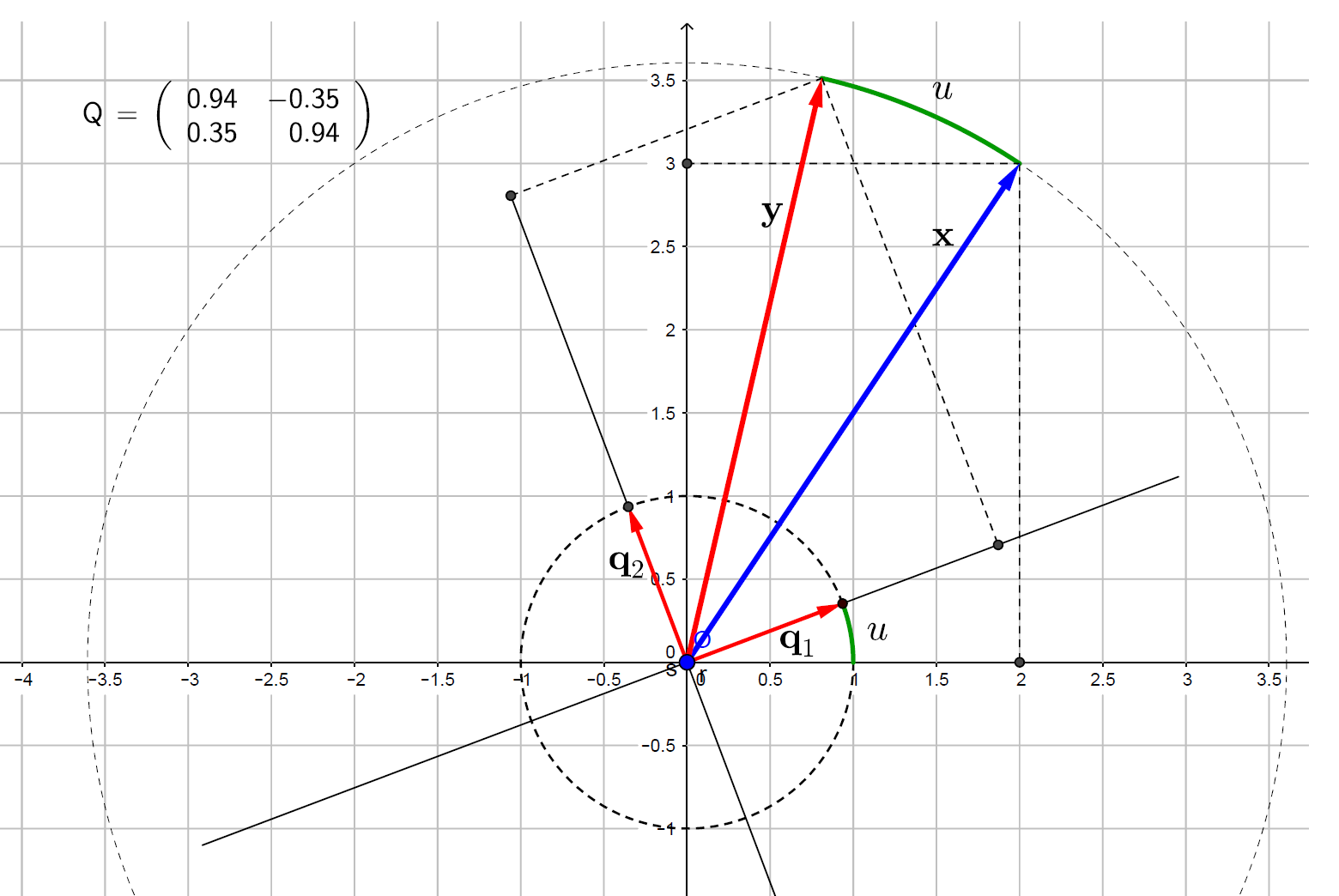
Every special-orthogonal matrix in $\,\reel^{2\times 2}\,$ can be written on the form
Note that $\,u\,$ is the directional angle for the first basis vector $\,(\cos(u),\sin(u))\,.$ Or more precisely: The q-coordinate system appears as a rotation of the standard coordinate system by the angle $\,u\,.$ Now we will investigate how $\,\mQ\,$ works as a mapping matrix.
A
Explain that the image $\,\my=\mathbf Q\cdot\mx\,$ appears after rotating the vector $\,\mx\,$ by the angle $\,u\,$ on the figure.
hint
It is essential to show that the coordinate vector of $\,\my\,$ with respect to the new basis is identical to the coordinate vector of $\,\mx\,$ in the standard basis.
$$\vekind qy=\matind qMe\cdot\vekind ey
=\matind qMe\cdot(\matind eMq\cdot\vekind ex)
=(\matind qMe\cdot\matind eMq)\cdot\vekind ex
=\vekind ex\,.$$
QED.
B
Open the GeoGebra sheet OrthogonalMap . Verify that while $\,\mQ\,$ maps $\,\mx\,$ in $\,\my\,$ by rotation by angle $\,u\,,$ then $\,\mQ\transp\,$ does the opposite: It maps $\,\mx\,$ in $\,\mz\,$ by rotation by angle $\,-u\,.$
$\,(\,\mathbf q_1,\mathbf q_2)\,$ is a basis corresponding to $\,\mQ\,$ while $\,(\,\mathbf q_3,\mathbf q_4)\,$ is a basis corresponding to $\,\mQ\transp\,$.
$\,\mQ\,$ maps $\,\mx\,$ in $\,\my\,$ and $\,\mQ\transp\,$ maps $\,\mx\,$ in $\,\mz\,$.
Move the vector $\,\mx\,$. What happens to $\,\mx\,$, $\,\my\,$ and $\,\mz\,$ regarding lengths and angles?
Move the vector $\,\mathbf q_1\,$. What happens to $\,\mx\,$, $\,\my\,$ and $\,\mz\,$ regarding lengths and angles?
Exercise 6: Analysis of a Symmetric Map
Assume that a symmetric $\,2\times 2\,$ matrix $\,\mA\,$ has been diagonalized by a special-orthogonal substitution like this:
In the equation $\,\mathbf Q\transp\cdot\mA\cdot\mathbf Q=\mathbf{\Lambda}\,$ you multiply on both sides by $\,\mQ\,$ from the left and by $\,\mQ\transp\,$ from the right.
B
In continuation of this, explain that therefore a symmetric map is composed like this:
The object is rotated by the angle $-u\,$ where $\,u\,$ denotes the directional angle for the first column in $\,\mQ\,.$
The rotated object is scaled by the factor $\,\lambda_1\,$ in the direction of the first axis and by the factor $\,\lambda_2\,$ in the direction of the second axis.
The scaled object is rotated (“backwards”) by the angle $\,u\,.$
as a mapping matrix for geometric vectors in the plane drawn from the origin. Find an angle of rotation $\,u\,$ to use for step 1 and 3 when composing the map. Determine the factors that in step 2 are needed for scaling in the direction of the first axis and second axis, respectively.
Now we shall factorize and analyse the mapping matrix