Only $\,f\,$ is linear. Showing that $\,g\,$ is not linear might be easiest with a counterexample.
B
Determine the kernel of the linear map you found above.
hint
To find $\ker(f)$, you must solve the system of equations $(x_1-x_2,-x_1+x_2)=(0,0)\,.$
answer
$$(x_1,x_2)=t(1,1)\,,\quad t \in \reel\,$$
In other words: A basis for $\ker (f)$ is given by $\,(\,(1,1)\,)\,.$
C
State the range of the linear map you found above.
hint
The image space corresponds to the concept of range for an elementary function known from highschool, i.e. all the possible values of the linear map.
hint
Therefore we must find all vectors $\mb=(b_1,b_2)\,$ that have the possibility to be a right-hand side of the equation $(x_1-x_2,-x_1+x_2)=(b_1,b_2)\,.$
answer
$$(x_1,x_2)=t(-1,1)\,,\quad t \in \reel$$
In other words: A basis for $\,f(\reel^2)\,$ is given by $\,(\,(-1,1)\,)\,.$
Exercise 2: Investigation of a Linear Map
Let $f:\reel ^4\rightarrow \reel^3$ be given by the expression
Show using Theorem 12.18, point 2, in eNote 12 that $f$ is linear, and state the mapping matrix $ \matind eFe$ for $f$ with respect to the standard bases in $\reel^4$ and $\reel^3$.
hint
The mapping matrix $ \matind eFe$ must fulfill the equation $ \vekind ey= \matind eFe \cdot \vekind ex$, where $ \vekind ey$ corresponds to $f((x_1,x_2,x_3,x_4))$ and $\vekind ex$ corresponds to $(x_1,x_2,x_3,x_4)$.
hint
Try to extract the mapping matrix from $f\,$ using Definition 12.17 in eNote 12.
Compute the dimension of the image space and provide a basis for the image space.
hint
The number of vectors in the basis equals the dimension of the image space, which in turn is related to the rank of the mapping matrix.
hint
You can find the basis vectors as some of the columns in the mapping matrix, but which and how many?
hint
See Method 12.25 in eNote 12.
answer
The dimension of the image space equals the rank of the mapping matrix, which is 2. Thus the image space is spanned by two vectors. the easy choice is the first two columns in the mapping matrix, which are linearly independent, so $f(\reel^4)=\mathrm{span}\lbrace(1,3,2),(1,-1,2)\rbrace$. Therefore a basis for the image space is:
$$(\,(1,3,2),(1,-1,2)\,)$$
C
Provide a basis for the kernel of the map.
hint
The kernel of the map, $\ker(f)$, is a space that consists of all vectors that satisfy the equation $f(\mx)=\mnul$.
hint
Therefore we must solve $f(\mx)=\mnul$, which can also be formulated as $\matind eFe \cdot \vekind ex = \mnul$.
hint
See Method 12.23 in eNote 12. Set up an augmented matrix consisting of the matrix $\matind eFe$ complemented with a column of zeros and solve the system of equation using Gauss-Jordan elimination.
answer
Since the rank of $\matind eFe$ is 2 and the number of columns is 4, then $\dim (\,\ker (f)\,) =4-2=2$. Therefore the basis will consist of two linearly independent vectors. From the Gauss-Jordan elimination an obvious choice as basis vectors is $(-\frac{5}{4},-\frac{7}{4},1,0)$ and $(-\frac{5}{4},\frac{1}{4},0,1)$.
D
Does $(1,2,3)$ belong to the image space of $f(\reel ^4)\,$?
hint
See Method 12.24 in eNote 12.
answer
No.
E
Solve the vector equation $\,f(\mathbf x)=(2,2,4)\,$.
hint
See Method 12.24 in eNote 12
answer
$$\mathbf x = (1,1,0,0)+\ker (f)$$
Exercise 3: Linear Maps in the Plane
In the following we will consider a standard coordinate system $\,(O, \mathbf i, \mathbf j)\,$ in the plane. All vectors are considered to be drawn from the origin. An arbitrary vector $\,\mathbf x\,$ is drawn in blue, while the image vector $\,\mathbf y\,$ is red. $\,\mathbf F\,$ constitutes the mapping matrix of $f\,$ with respect to the standard basis.
Check by computation that $\,\mathbf y\,$ is correct, when $\,\mathbf x\,$ and the mapping matrix $\,\mathbf F\,$ is as shown.
Change $\,\mathbf F\,$ to $\mathbf F=\,\begin{matr}{rr}3&1\newline 1&-1\end{matr}$ by moving the column vectors $\,\mathbf s_1\,$ and $\,\mathbf s_2\,$ using the cursor. Then find the image of $\,(1,2)\,$ by moving $\,\mathbf x\,$ to $\,(1,2)\,$ using the cursor.
Find the image of the basis vector $\,\mathbf i\,$ by pulling $\,\mathbf x\,$ to $(1,0)\,$. Repeat for basis vector $\,\mathbf j\,$. Do the images of the basis vectors fit the numbers in $\,\mathbf F\,$?
The idea is that $\,\mathbf x\,$ is bound to the line segment shown. Move $\,\mathbf x\,$, and follow the image $\,\mathbf y\,$.
Displace the line segment parallel to itself using the mouse and again move $\,\mathbf x\,.$ What happens to the image. Possibly try other settings for $\,\mathbf F\,$. Summarize your observations in a hypothesis.
Introductory exercise: How should $\,\mathbf F\,$ be changed so that the blue house is mapped onto the mirror image in the y-axis? Same question for the x-axis.
Test of the diagonal matrix $\mathbf F=\,\begin{matr}{rr}1&0\newline 0&k\end{matr}$ Try different values for $k$, e.g. $\,-3,-2,-1,0,1,2,3\,$. Describe what happens!
Test of the diagonal matrix $\mathbf F=\,\begin{matr}{rr}k&0\newline 0&1\end{matr}$ Try different values for $k$, e.g. $\,-3,-2,-1,0,1,2,3\,$. Describe what happens!
Other diagonal matrices: Describe the red house in relation to the blue one, when $\mathbf F=\,\begin{matr}{rr}3&0\newline 0&2\end{matr}$
Summarize your observations: What is special about diagonal mapping matrices? How do they affect sets of points in the plane?
Exercise 5: The Dimension Theorem
A
A linear map $f:\mathbb R^3\rightarrow \mathbb R^3$ has with respect to the standard basis for $\mathbb R^3$ the mapping matrix
It is now given that the kernel of $f$ has 1 dimension. Find immediately, by no other means than just mental work, a basis for $\,f(V)\,$.
answer
A possible basis is $\,(\,(1,2,3),(1,0,0)\,)\,$.
B
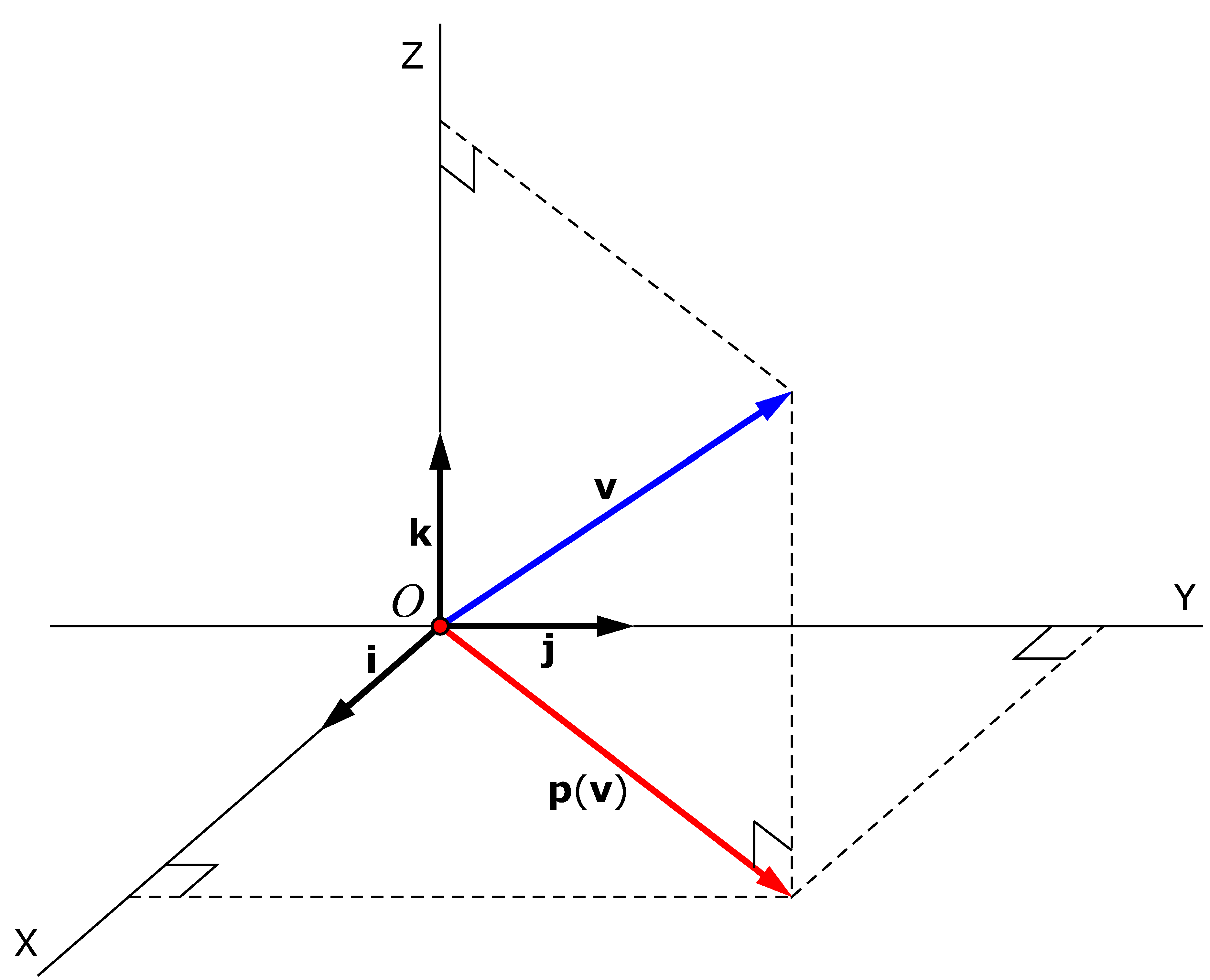
In 3D space a standard coordinate system $\,(O,\mathbf i,\mathbf j,\mathbf k)$ is given. All vectors are imagined to be drawn from the origin. The map $\,p\,$ projects vectors down into the $(X,Y)$-plane in 3D space as shown on the figure.
Show that $\,p\,$ is linear, and state the mapping matrix $\matind ePe$ of $p$ with respect to the standard basis $e\,.$ Determine a basis for the kernel and for the image space of $\,p$. Check that the dimension theorem is satisfied.
A possible basis for $\,\ker(p)\,$ is $\,(\mathbf k)\,$. A possible basis for the image space is $\,(\mathbf i,\mathbf j)\,$. The domain is 3-dimensional, the kernel is 1-dimensional, and the image space is 2-dimensional - since $3=1+2$, the Dimension Theorem is fulfilled.
Exercise 6: Mapping Matrices of Reflections
In the 2D plane a standard $\,(O,\mathbf i,\mathbf j)$-coordinate system is given, and all vectors are imagined as drawn from the origin. As mentioned in Exercise 12.3 in eNote 12 reflections in lines through the origin are linear.
Here we are considering mirror imaging of vectors in the line $\,y=x\,.$ This is a linear map, which we can call $s\,.$
A
Determine $s(\mathbf i)$ and $s(\mathbf j)$, state the mapping matrix $\matind eSe$ of $s\,$ and determine an expression of the mirror image of an arbitrary vector in the plane $\,\mathbf u\,$ with the $e$-coordinates $(u_1,u_2)\,$.
answer
$$\matind eSe =\begin{matr}{rr}0&1\newline 1&0\end{matr}$$
The image of $\,\mathbf u\,$ in $e$-coordinates is $\begin{matr}{r}u_2\newline u_1\end{matr}\,$.
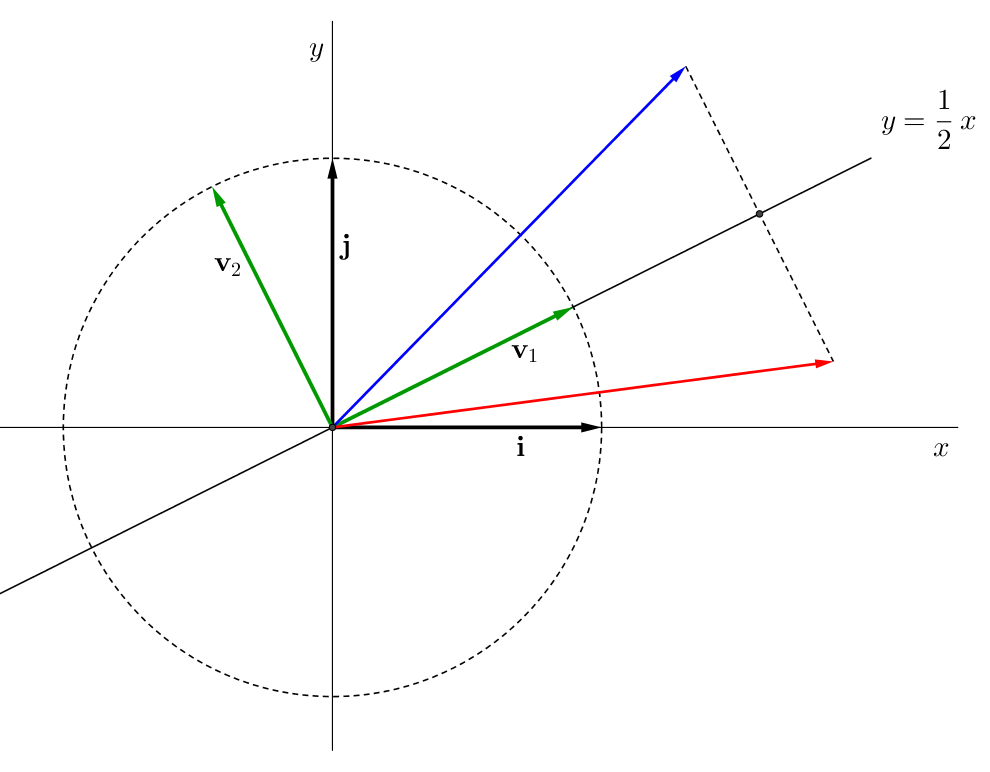
Let us now consider a new $\,(O,\mathbf v_1,\mathbf v_2)$-coordinate system in which all vectors are imagined as drawn from the origin. $\,\mv_1\,$ is a unit vector along the line $\,y=\frac 12\,x\,,$ as shown in the figure, and $\,\mv_2\,$ is the vector perpendicular to $\,\mv_1\,$ as shown.
We wish to determine the mapping matrix $\matind eRe$ of the linear map $\,r\,$ that mirrors vectors in the line $\,y=\frac 12\,x\,.$ We will do this in two steps.
B
Determine the mapping matrix $\matind vRv$ of $r\,$ with respect to the basis $\,v=(\mv_1,\mv_2)\,.$
hint
What happens to the basis vectors $\,\mv_1\,$ and $\,\mv_2\,$ using this map?
Determine the mapping matrix $\matind eRe$ of $r\,$ with respect to the standard basis. Let $\,\mathbf u\,$ be an arbitrary vector in the plane with the $e$-coordinates $(u_1,u_2)\,.$ Determine an expression of the mirror image of $\,\mathbf u\,$ in the line $\,y=\frac 12\,x\,.$
hint
You will need the change-of-basis matrix $\,\matind eMv\,,$ as well as its inverse.
hint
First, find the $e$-coordinates of $v_1$. This can be found via som clever geometry, such as Pythagoras.
answer
$$\matind eRe =\begin{matr}{rr}\frac35&\frac45\newline \frac45&-\frac35\end{matr}$$
The $e$-coordinate vector of the image of $\,\mathbf u$:
We are given the vectors $\,\ma_1=(1,2)\,$ and $\,\ma_2=(3,7)\,$ in $\,\reel^2\,$ and $\,\mc_1=(1,2,2)\,,$$\,\mc_2=(2,3,1)\,$ and $\,\mc_3=(1,2,1)\,$ in $\,\reel^3\,$. Let the linear map $\,f:\reel^2\rightarrow\reel^3\,$ be given by
Show that $\,\ma_1\,$ and $\,\ma_2\,$ constitute a basis for $\,\reel^2\,$ and that $\,\mc_1\,$, $\,\mc_2\,$ and $\,\mc_3\,$ constitute a basis for $\,\reel^3\,.$
hint
A basis for a vector space is a set of vectors that spans the space (there must be enough vectors to span it, and they must all belong to the space they are supposed to span) and that are mutually, linearly independent.
hint
Enter the two (or three) vectors as columns in a matrix. If this matrix is regular, the vectors are linearly independent.
answer
Since $\ma_1$ and $\ma_2$ are two linearly independent vectors and $\reel^2$ is 2-dimensional, then they can constitute a basis. Likewise, $\mc_1$, $\mc_2$ and $\mc_3$ are three linearly independent vectors and $\reel^3$ is 3-dimensional.
B
Determine the mapping matrix of $\,f\,$ with respect to the basis $\,(\ma_1,\ma_2)\,$ for $\,\reel^2\,$ and the base $\,(\mc_1,\mc_2,\mc_3)\,$ for $\,\reel^3\,$.
hint
You need to determine a matrix $\matind cFa$, such that $\vekind cy=\matind cFa\cdot\vekind ax$.
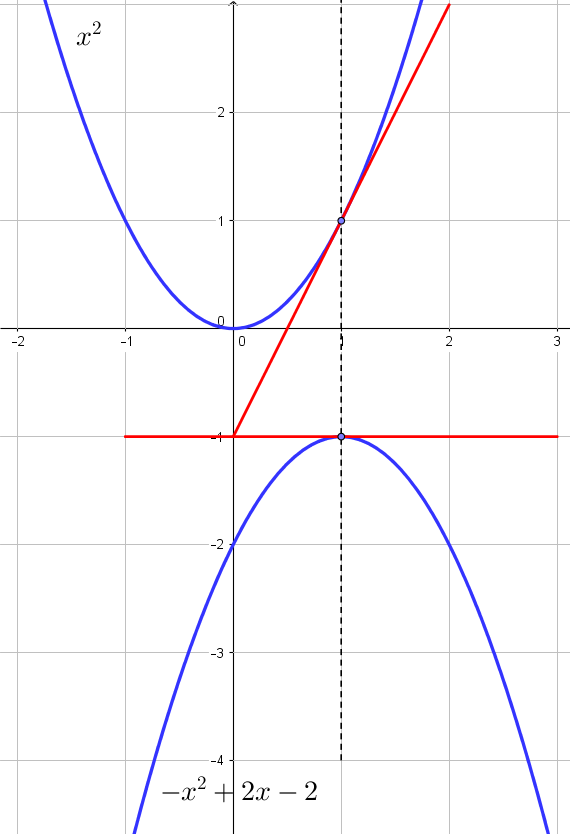
The set of second-degree polynomials $\,P_2(\reel)\,$ can be viewed as a 3-dimensional vector space. The real numbers $\,\reel\,$ is a 1-dimensional vector space. We will investigate a map from the former vector space to the latter, $\,f:P_2(\reel)\rightarrow \reel\,$. Such a map can be given by
$$\,f(P(x))=P\,'(1)\,.$$
Here is an illustration with a couple of examples:
A
Compute $\,f(x^2)\,$ and $\,f(-x^2+2x-2)\,.$ Formulate in your own words what the map $\,f\,$ does to its input. Does your result match your formulation in words, and does it match what you see in the figure?
answer
$$f(x^2)=2$$
$$f(-x^2+2x-2)=0$$
B
Show that $f$ is linear.
hint
You must show
$f(P(x)+Q(x))=f(P(x))+f(Q(x))$
$f(k(P(x))=k\cdot f(P(x))$
hint
See example 12.8 in eNote 12.
C
One of the two polynomials in the figure belongs to the kernel of $\,f\,.$ Which? Provide a basis for $\,\ker (f)\,.$
hint
What must the coefficients in a polynomial that belongs to ker$(f)\,$ fulfill?
answer
A basis for the kernel can be
$$(1\,,\,x^2-2x)$$
D
Explain that the image space $\,f(P_2(\reel))\,$ of $\,f\,$ is equal to the codomain of $\,f\,.$
Another map $\,g:P_2(\reel)\rightarrow \reel\,$ is given by
$$\,g(P(x))=P\,'(0)+1\,.$$
E
Formulate in words what the map does to an input. Prove that $\,g\,$ is not linear.
hint
This is most easily proved with a counterexample.
hint
For instance, choose an example like $P(x)=x$ and a scalar like $k=2$, and show that $\,g(2x) \neq 2g(x)\,.$