We are given the matix $\,\mA=\begin{matr}{rrrr} 1 & 0 & 1 & 1 \newline 0 & 2 & 2 & 4 \newline 1 & 1 & 0 & 0 \newline 1 & 1 & 2 & 0 \end{matr}\,.$
A
Compute $\mathrm{det}(\mA)\,$ by expansion along a row or column of your own choice.
hint
Choose a row or a column with as many $0$’s as possible.
answer
$$12$$
B
Using row operations, reduce $\,\mA\,$ to a triangular matrix, and use this to compute $\mathrm{det}(\mA)\,.$
hint
See Theorem 9.13 and Theorem 9.16. Remember that row operations might influence the determinant.
answer
$$12$$
Exercise 2: Determinants and Rank
A
Recap.
Given the polynomial $\,P(x)=-x^6+x^5+x^4-x^3\,,$ factorize $\,P(x)\,$ by first “taking $\,-x^3\,$ outside of a bracket”, leaving behind a third-degree polynomial within the bracket. Find the roots of this third-degree polynomial and then state all roots of $\,P(x)\,$ along with their algebraic multiplicities.
The sum of all multiplicities is, as expected, equal to the polynomial degree, which is 6.
Given the matrix \begin{equation}
\mA = \begin{matr}{llll} 1 & a & a^2 & a^3 \newline 1 & 0 & a^2 & a^3 \newline 1 & a & a & a^3 \newline 1 & a & a^2 & a \end{matr}, \quad \mathrm{where} \quad a \in \reel.
\end{equation}
B
Determine (you can use Maple) the determinant of $\mA\,.$
answer
$$\mathrm{det}(\mA)=-a^6+a^5+a^4-a^3$$
C
For which values of $\,a\,$ is $\,\mA\,$ a singular matrix?
answer
$$a \in \lbrace -1,0,1 \rbrace$$
D
Find the rank of $\,\mA\,$ for each $\,a \in \lbrace -4, -3, -2, -1, 0, 1, 2, 3, 4 \rbrace\,.$
How is the rank related to the roots of the determinant found above?
answer
For $\,a \in \lbrace -4,-3,-2,2,3,4 \rbrace,$ the rank is 4, i.e. $\,\mA\,$ has full rank. For $\,a \in \lbrace -1,0,1 \rbrace$ the rank is 3, 1 and 2, respectively. A non-full rank implies singularity.
E
Find the rank of $\mA$ for all $ a \in \reel $.
hint
A non-full rank corresponds to a determinant of zero. Both of these imply singularity.
answer
For $a \in \reel \setminus \lbrace -1,0,1 \rbrace$ the rank is 4.
For $a \in \lbrace -1,0,1 \rbrace$ the rank is 3, 1 and 2, respectively.
Exercise 3: Teaser Exercise in which the Identity Matrix Appears
Solve the following questions by hand and by clever mental work!
Explain using determinants that $\,\mA\,$ and $\,\mB\,$ are regular and thus invertible. Can you conclude from this that $\,\mA\mB\,$ is regular and invertibel?
Exercise 5: Vectors: Addition and Multiplication by a Scalar
A
Draw two vectors $\,\mathbf a\,$ and $\,\mathbf b\,$ on a piece of paper. Construct the vectors $\,\mathbf a+\mathbf b\,$ and $\,\mathbf a-\mathbf b\,.$
B
Now try the product of a vector and a scalar. Draw a vector $\,\mathbf c\,$ on a piece of paper. What do the vectors $\,\frac 12 \mathbf c\,$ and $-3\mathbf c\,$ look like?
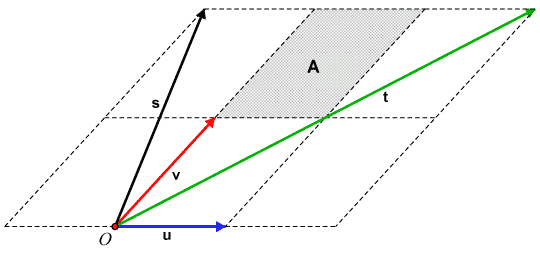
Express both $\mathbf s$ and $\mathbf t$ as a linear combination of $\mathbf u$ and $\mathbf v$, and substitute the two linear combinations in place of $\mathbf s$ and $\mathbf t$ in the right-hand side of the equation.
C
Determine four real numbers $a,\,b,\,c\,\,\mathrm{and}\,\,d$ such that $A$ can be described by the parametric representation
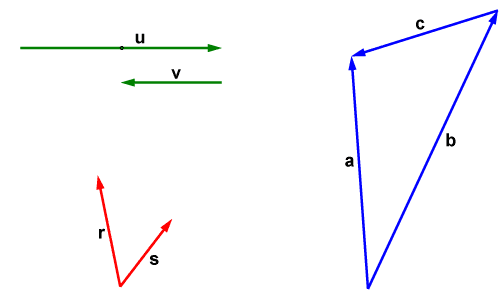
Three different scenarios in the plane are shown in the figure.
A
Decide for each of the set of vectors $(\mathbf u,\mathbf v)$, $(\mathbf r,\mathbf s)$ and $(\mathbf a,\mathbf b,\mathbf c)$ whether or not they are linearly independent. If not, write the zero-vector as a (proper) linear combination of the vectors in the set.
hint
See Definition 10.19 in eNote 10.
hint
See Theorem 10.23 in eNote 10.
answer
$\mathbf r$ and $\mathbf s$ are not parallel, therefore they are linearly independent.
$\mathbf u$ and $\mathbf v$ are linearly dependent since $\mathbf u=-2 \mathbf v\,$, so $\mathbf u+2\mathbf v=\mnul\,$.
$\mathbf a$, $\mathbf b$ and $\mathbf c$ are linearly dependent since
$\mathbf a=\mathbf b+\mathbf c\,$, so $\mathbf a-\mathbf b-\mathbf c=\mnul\,$.
Exercise 8: Change of Basis and Coordinates in the Plane
In this exercise we will work out how the coordinates of a given vector change when we change the basis.
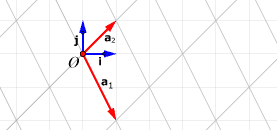
The figure shows the standard basis $\mathrm e=(\mathbf i, \mathbf j)$ and a basis $\mathrm a=(\mathbf a_1, \mathbf a_2)$.
A
A vector $\mathbf u$ has the coordinates $(5,-1)$ with respect to the standard basis $\mathrm e$. Determine the coordinates of $\mathbf u$ with respect to basis $\mathrm a$.
A vector $\mathbf v$ has the coordinates $(-1,-2)$ with respect to basis $\mathrm a$. Determine the coordinates of $\mathbf v$ with respect to basis $\mathrm e$.
$$ _\mathrm e \mathbf v=
\begin{matr}{r}-3\newline 0\end{matr}$$
Exercise 9: Change of Basis and Coordinates in 3D Space
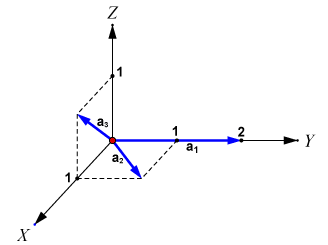
In this exercise we will be working with a standard coordinate system as well as with a basis $\mathrm a$ as shown in the figure.
A
Determine the determinant of the matrix $\,\left[\,\ma_1\,\,\ma_2\,\,\ma_3\,\right]\,.$ Explain that the set $\,(\ma_1,\ma_2,\ma_3)\,$ actually constitutes a basis.
hint
Set up a matrix with the shown vectors in $\mathrm e$ coordinates and reduce it.
answer
Since we are given three vectors that all belong to the 3D space, and since they are linearly independent which the determinant tells us, then they constitute a basis for the set of all vectors in 3D space.
B
Three 3D vectors $\mathbf u,\,\mv$ and $\mathbf w$ are given in coordinates with respect to basis $\mathrm a$:
Determine an equation for $\alpha$ with respect to the standard coordinate system.
hint
You can achieve a normal vector for $\alpha$ by determining the cross product of two (linearly independent) directional vectors.
answer
The cross product of the two directional vectors is $(-3,-1,7)$. An initial point in the plane is chosen: $(0,-2,0)$. Thus the equation for the plane is: